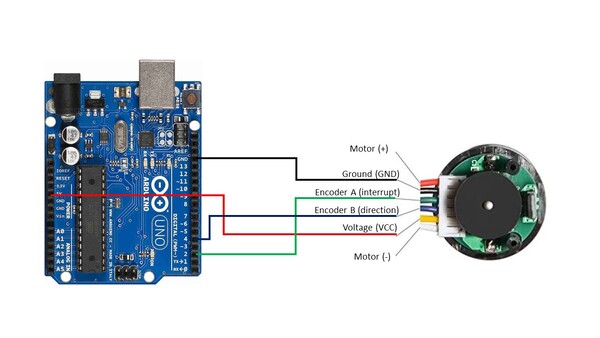
Learn how to control the speed of a DC motor with an encoder using a PID controller. In this video, there are several important steps in this process:
0. Hardware
1. Velocity measurements
2. Measurement filtering
3. PI control
4. Variations
3. How to control a DC motor with an encoder
In this video, Curio Res illustrates how an encoder works, and then use a PID control algorithm to control the motor position. All of the steps are included so that you will be easily able to make the system yourself.
4. PID for DC Motor Position Control using Rotary Potentiometer
(How to calculate Integrator and Drivative error)
5. PID CONTROLLER for DC MOTOR with Timer Interrupts and Anti-windup
6. Calculate Pulses per Revolution for a DC Motor With Encoder
From Wikipedia: "A PID controller calculates an 'error' value as the
difference between a measured [Input] and a desired setpoint. The
controller attempts to minimize the error by adjusting [an Output]."
So, you tell the PID what to measure (the "Input",) Where you want
that measurement to be (the "Setpoint",) and the variable to adjust
that can make that happen (the "Output".) The PID then adjusts the
output trying to make the input equal the setpoint.
For reference, in a car, the Input, Setpoint, and Output would be the speed, desired speed, and gas pedal angle respectively.
Không có nhận xét nào:
Đăng nhận xét